Intuition
Interactive art installation
This project is the part of Interactive arts course held by New Media Design department at National Institute of Design, Ahmadabad.
Concept
Intuition means strong feeling or hunch of future events, it is a gut feeling. Everyone has experienced a gut feeling – that unconscious reasoning that forces us to do something without telling us why or how. It's a knowing without knowing. It's a sixth sense.
Sometimes we think logical. However sometimes we go totally illogical. This illogical or unconscious thinking is called intuitive thinking. Surprisingly, these intuitive thoughts turns into reality most of the time. Why does it happen that these intuitions are correct?
I think that intuition is an inner force, a driving force which already knows our next destination. It guides us to travel from one destination to another destination in our life. If we think that life has predefined path, our intuitions helps us to travel along that path. When we start believing on intuition we get more and more intuitions and we start to realize their power.
My attempt was to explore intuitive thought process. I tried to create system which could trigger a thought in viewer’s mind. I designed an installation which tried to engage viewer and making them aware about the power of intuitions through different perspectives.
Process
When we see an uneven surface, it's our natural tendency to wish that it could be flat. I found this could trigger an intuitive thought in a mind.
I think intuition is superpower that all of us holds. So I thought to make user interaction with installation more magical which will make them to feel as if they are superhumans.
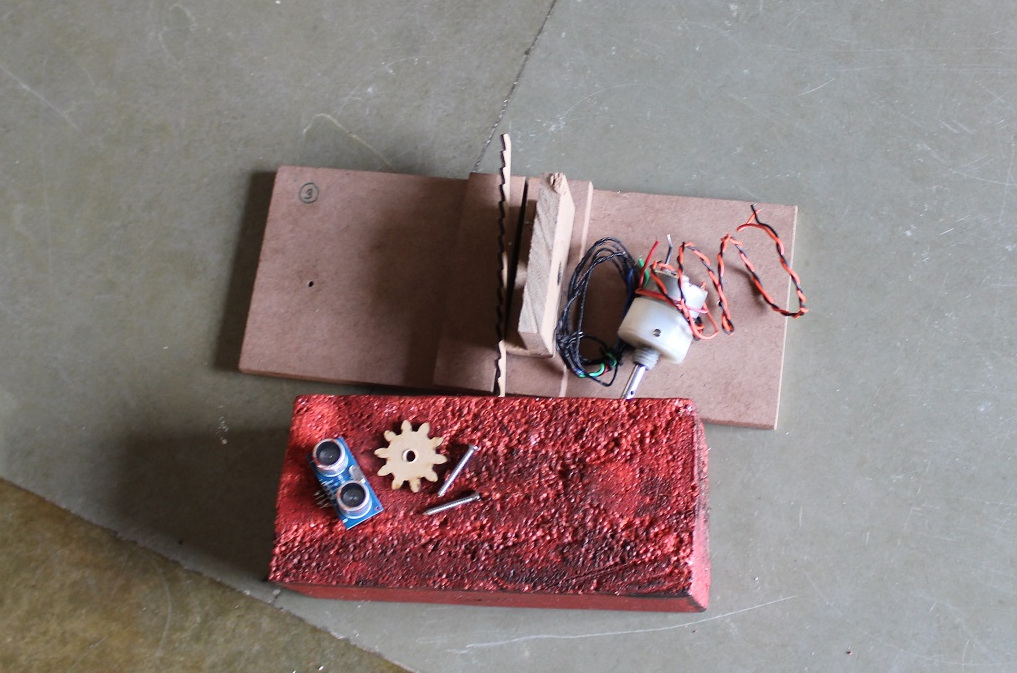
I started with the simple piece of wooden board (MDF), styrofoam, DC motor, ultrasonic proximity sensor and arduino micro-controller.
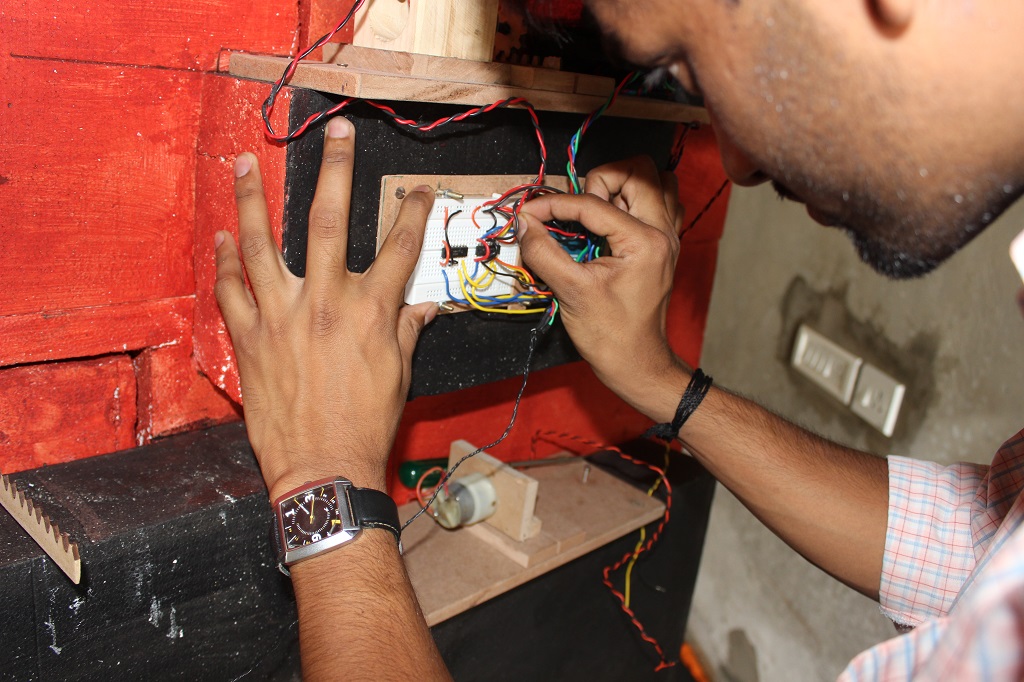
Here is making of first prototype of installation.

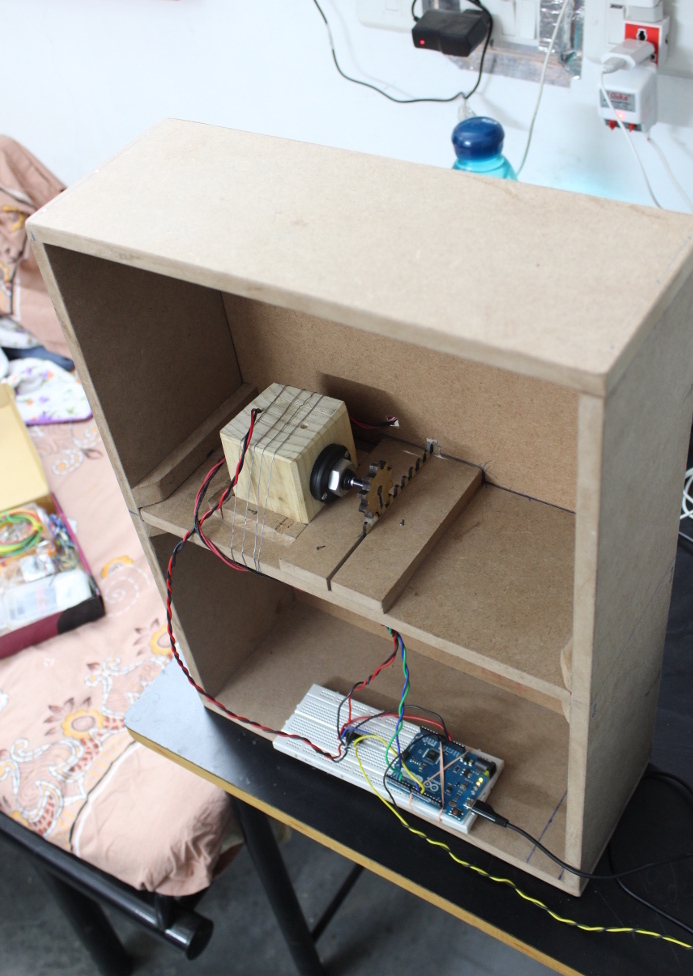
Proximity sensor detects human presence or obstacle within its range and program written for arduino decides the direction of DC motor. I used LD293D IC for controlling DC motor direction.
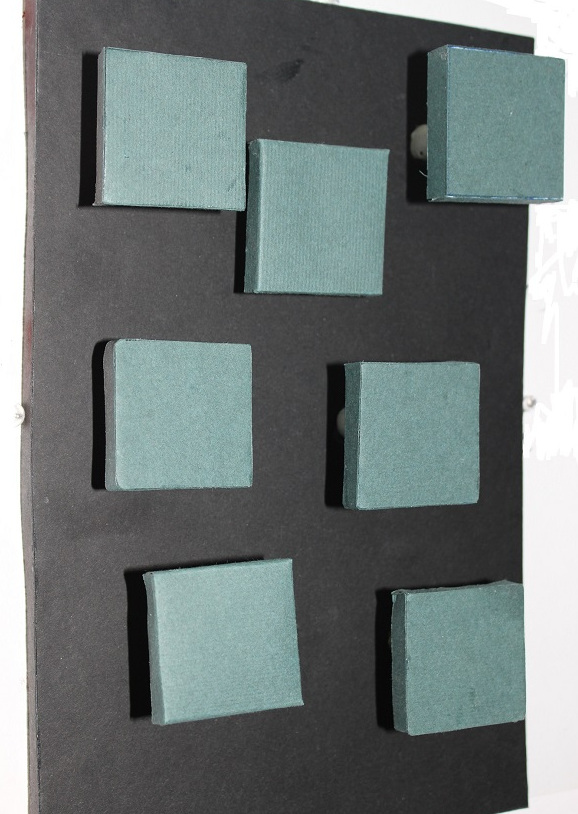
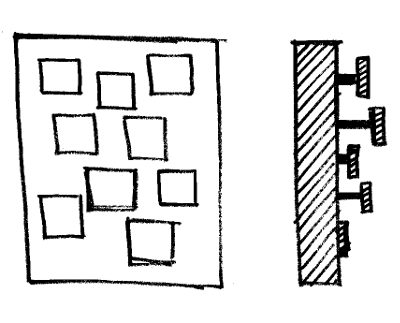
After successfully testing the concept on a small prototype. I decided a form of the installation. So considering a wall as a metaphor for intuition installation, I implemented the next prototype with a wall.
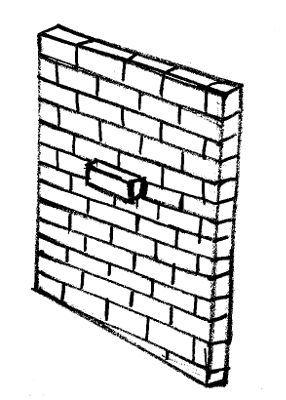
The wall is made up of styrofoam and it is painted with acrylic colors. There are three bricks in the wall which are sensitive to user's presence or user's gesture.
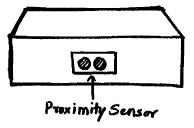
Each of the three bricks has a ultrasonic proximity sensor embedded inside.
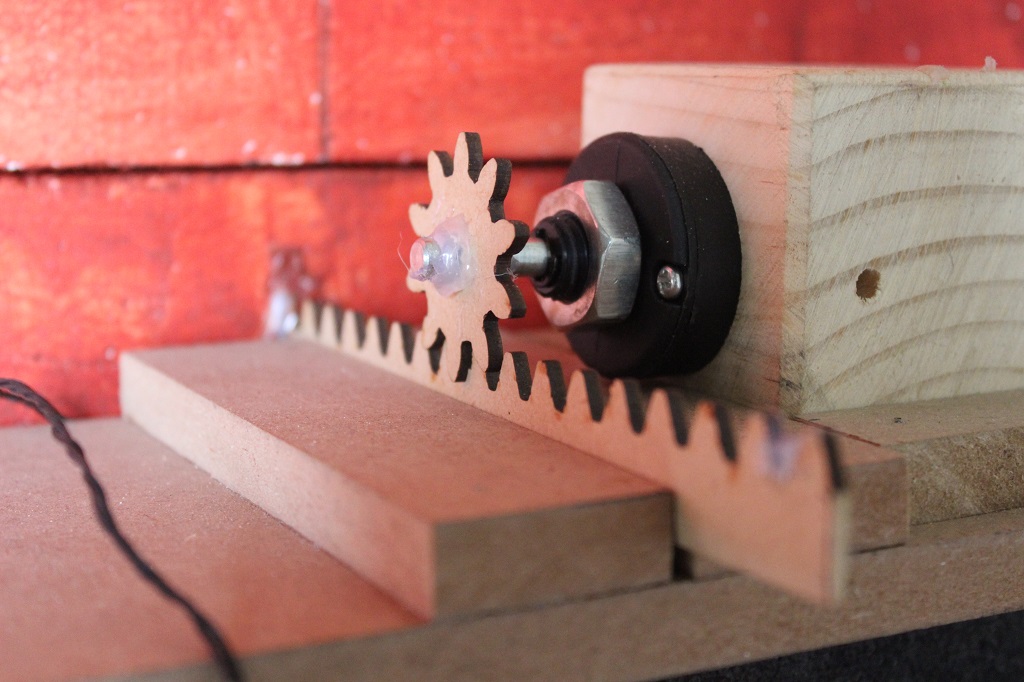
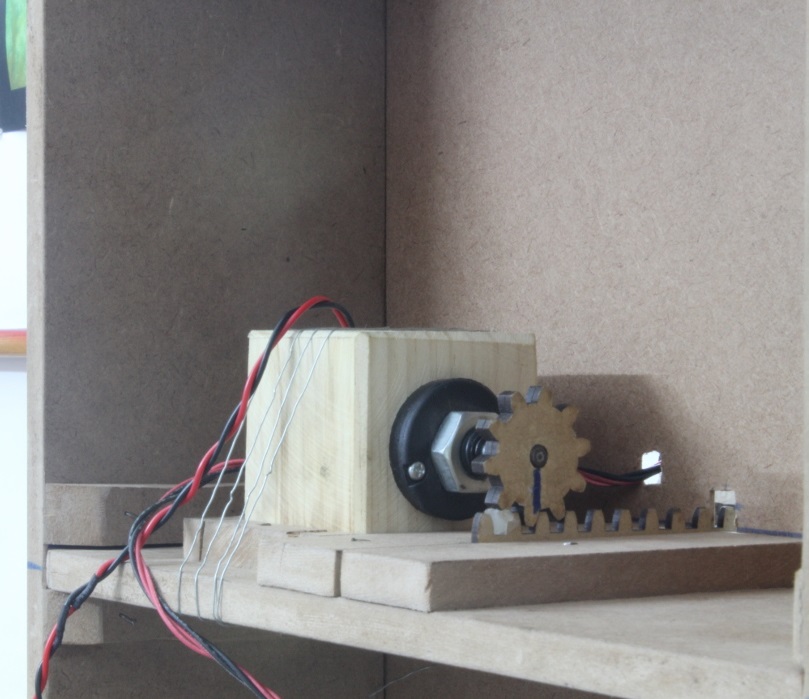
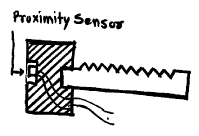
I used the DC motor and converted its rotational motion into linear motion using rack and pinion gears.
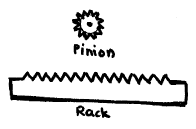
Each of the brick has rack gear attached from behind.

DC motor is attached with pinion gear.

All of these components are connected on a wooden block and ultrasonic sensors and DC motors are connected to arduino.
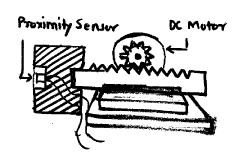
This whole assembly is fixed inside the styrofoam wall. I used random number logic to decide which brick should come out.